Seite 7 von 18
Re: Caterham R400 Superlight going UMC1
Verfasst: So Mai 01, 2016 10:41 am
von Dominik335i
Sooo, Stevie (so heißt er übrigens

) is
back on Track!!! Das Pilotlager hatte es zerlegt, was auch alle meine Symptome erklären würde. Auf einer kurzen Probefahrt war zumindest alles wieder in bester Ordnung, drückt mir die Daumen, dass es dabei bleibt!

Im Zuge des Motorausbaus habe ich auch gleich das neue Triggerrad mit schmaleren Zähnen und den Kondensator eingebaut. Schau mer mal, ob es jetzt noch Sync Losts bei über 8.000 gibt.
Außerdem hab ich mich nochmal an das Thema Map Sampling nur an Zylinder 1 rangewagt, wie es CKP in seinem Thread beschreibt. Also mit Nr. of Sampling events 2. Das MAP Window konnte ich über den MAP Logger perfekt auf das Minimum platzieren und erwartungsgemäß sind die Werte stark gefallen (von ca. 67kPa im Leerlauf mit 4 in 1 untimed auf ~50kPa). Allerdings schwankt es extreeem stark und zwischendrin treten immer wieder Spitzen auf. Außerdem ist die Lage des Minimums schon ziemlich stark drehzahlabhängig. Bei 8000 verschiebt sich das Fenster im Vergleich zum Leerlauf um ca. 50°. Lange Rede, kurzer Sinn: Ich habe dann doch wieder auf 4 in 1 untimed und Drossel/Dämpfungsvolumen rückgebaut. Damit habe ich einen sehr stabilen MAP.
Ein Phänomen beschäftigt mich aber noch: Der Motor geht, wenn er ca. eine Minute im Leerlauf läuft, plötzlich und ohne erkennbare Ursache aus. Im Log kann ich absolut keinen Grund dafür erkennen, alles ist völlig stabil und von einer auf die nächste Sekunde plötzlich tot. Könnt ihr bitte mal reinschauen, ob euch was auffällt? Der Log ist übrigens noch mit Map Sampling, da sieht man auch die starken Schwankungen.
Gruß
Dominik
- IMG_7846.JPG (372.89 KiB) 9141 mal betrachtet
Re: Caterham R400 Superlight going UMC1
Verfasst: Di Mai 03, 2016 9:48 am
von Dominik335i
Hat echt niemand eine Idee, woran das Absterben im Leerlauf liegen könnte?

Re: Caterham R400 Superlight going UMC1
Verfasst: Di Mai 03, 2016 10:02 am
von ChristianK
Das einzige, was mir auffällt ist, dass er im Moment des Absterbens einen Sync Lost hat. Paralell dazu sinkt genau an dieser Stelle die Boardspannung von 14,2V auf 14,1V.
Alles andere Relevante sieht total unauffällig aus.

Seltsam...
Re: Caterham R400 Superlight going UMC1
Verfasst: Di Mai 03, 2016 12:10 pm
von suzuki90
Dominik335i hat geschrieben:Ein Phänomen beschäftigt mich aber noch: Der Motor geht, wenn er ca. eine Minute im Leerlauf läuft, plötzlich und ohne erkennbare Ursache aus. Im Log kann ich absolut keinen Grund dafür erkennen, alles ist völlig stabil und von einer auf die nächste Sekunde plötzlich tot. Könnt ihr bitte mal reinschauen, ob euch was auffällt? Der Log ist übrigens noch mit Map Sampling, da sieht man auch die starken Schwankungen.
Was ich im Log seltsam finde: Eine halbe Sekunde, bevor er ausgeht, bleiben Werte wie Drehzahl und Map konstant. Das ist aber unrealisitisch, da die Drehzahl und der Map ständig leichte Wertänderungen haben. Außerdem ist die Drehzahl dann innerhalb 0,08 sec auf 0.
Würde jetzt nur die Verbrennung aussetzen, alles andere normal weiterarbeiten, dann würde die Drahzahl in einer Rampe abfahren.
Auch wenn du vielleicht eine leichte Schwungmasse hast, so schnell bleibt kein Motor stehen.
Daher gehe ich stark davon aus, dass die Drehzahlerfassung da einen Fehler hat und damit das Drehzahlsignal plötzlich weg ist. Geht ja auch mit einem Sync Lost einher.
Kannst du das immer wieder künstlich herbeiführen? Dann würde ich da mal einen Tooth Log drüber laufen lassen, während das passiert.
Möglich, dass im Stand ein Sensor zu heiß wird? Vielleicht wegen Krümmernähe?
Re: Caterham R400 Superlight going UMC1
Verfasst: Di Mai 03, 2016 12:52 pm
von Dominik335i
Hi,
das ist schon mal eine super Fährte, ist mir nicht aufgefallen. Danke! Beide Sensoren (KW und NW) sitzen eigentlich exponiert und der Krümmer ist eingepackt. Also Temperatur kann man, denke ich, ausschließen.
Ich werde jetzt mal richtig abstimmen und wenn das Problem weiterhin besteht (nur Leerlauf nach einer gewissen Zeit), versuche ich es mit dem Tooth Logger.
Gruß
Dominik
Re: Caterham R400 Superlight going UMC1
Verfasst: Mi Mai 04, 2016 9:12 pm
von chapy
ca. 0.5sec vor stillstand bleibt das drehzahlsignal weg.
wenn man sich die TimingErr% betrachtet,sieht man 0.5sec vor schluß,daß das triggersignal weg bleibt.
so würde ich es deuten.
Re: Caterham R400 Superlight going UMC1
Verfasst: So Mai 15, 2016 11:02 pm
von Dominik335i
Stevie fährt wieder. Eigentlich wollte ich ja den ITB-Mode testen, aber bin ich damit nicht weitergekommen. Hab schön sauber die Switchpoint-Kurve mit einem langen Log herausgefahren, aber das Abstimmen war irgendwie mühselig. Letztendlich habe ich mich jetzt für alpha/n mit multiply map entschieden. Damit lässt sich der Motor traumhaft leicht abstimmen und ruckelt auch bei Minimallast nicht.
Leider verfolgt mich noch immer das Problem des absterbenden Motors im Leerlauf. Eine blöde Idee: Ich hab den Luftspalt am KW-Sensor auf 8/10mm eingestellt. Gibt es bei Hall-Sensoren einen Mindestabstand?! Cherry empfielt 1,5mm, aber ich dachte bisher, dass je kleiner, desto besser? Oder vekehrt sich das irgendwann ins Gegenteil?!
EDIT: "For best performance, the sensor should be located as close as possible to the target." --> Frage geklärt
Gruß
Dominik
Re: Caterham R400 Superlight going UMC1
Verfasst: Do Mai 19, 2016 9:46 pm
von Dominik335i
So, jetzt brauch ich den Rat von euch Experten, denn ich hab keine Ahnung, was da los ist

Geht um den Dauerbrenner Absterben. Während der Fahrt ist alles OK, außer dass ich im Datenlog alle paar Minuten mal nen Sync Lost Reason#2 sehe. Merkt man aber nicht mal.
Unten seht ihr einen Tooth Log im Leerlauf bis zum Absterben. Bis zum Set 181 von 183 ist alles in bester Ordnung. Aber dann beim Set 182 scheint das Signal invertiert zu sein?! Hä, was issn da los? Daraufhin geht auch der Motor aus, selbst wenn im Set 183 alles wieder ok zu sein scheint. Vielleicht haben die Sync Losts während der Fahrt die gleiche Ursache nur dass er sich dann wieder fängt, weil die Drehzahl höher ist?
Sensor kaputt?!
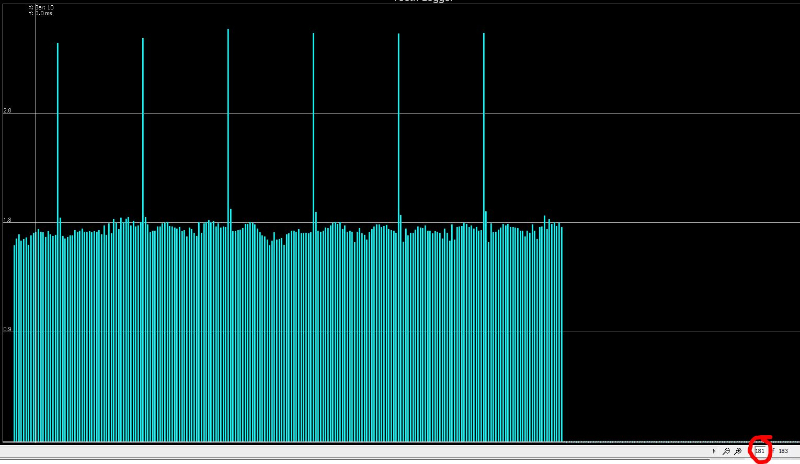
- 1.JPG (181.6 KiB) 8759 mal betrachtet
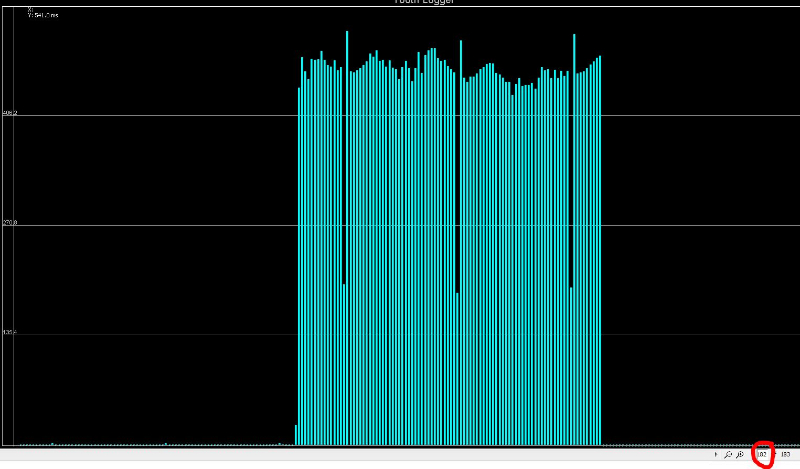
- 2.JPG (171.01 KiB) 8759 mal betrachtet
Re: Caterham R400 Superlight going UMC1
Verfasst: Do Mai 19, 2016 10:01 pm
von CKP
ist das nicht im ersten Screenshot auch schon verpolt? Weil der zweite Balken nach dem ersten großen auch noch etwas höher geht.
Re: Caterham R400 Superlight going UMC1
Verfasst: Do Mai 19, 2016 11:18 pm
von Dominik335i
CKP hat geschrieben:ist das nicht im ersten Screenshot auch schon verpolt? Weil der zweite Balken nach dem ersten großen auch noch etwas höher geht.
D.h. ich sollte es mal mit falling statt rising edge versuchen?
Re: Caterham R400 Superlight going UMC1
Verfasst: Do Mai 19, 2016 11:24 pm
von CKP
Nein, sondern Kabel vertauschen.
Also beim VR-Sensor würde ich einfach beide Kabel vertauschen.
Beim Hall würde ich dann mal Masse und Signal vertauschen. Versorgungsspannung so lassen wie bisher.
Wobei ich selbst noch keinen Hall-KW Sensor hatte.
Habe gerade mal alten Log rausgekramt, als ich neuen Motor eingebaut habe.
Da hat er nicht höher als 6000 rpm gedreht (bzw dann ging der Motor aus wegen Sync Loss). Dann Tooth-Log gemacht.
Sah so ähnlich aus wie bei deinem ersten Screenshot. Nur war der zweite Balken noch bisschen höher als bei dir.
Dann Masse und Signal vom VR-Sensor vertauscht und dann hat wieder alles gepasst.
Musst dann nur wieder den Tooth #1 Angle neu einstellen! (Ganz wichtig)
Kannst ja direkt beim ersten Start nach dem Kabelvertauschen nochmal einen Screenshot machen.
Re: Caterham R400 Superlight going UMC1
Verfasst: Fr Mai 20, 2016 9:29 am
von Dominik335i
Morgen!
Ich benutze einen Cherry Hallsensor, den ich mit 5V betreibe und wie im UMC1-Manual angegeben angeschlossen habe (Signal an VR+, VR- offen, Pullup):
Bei Anschluss eines Hall Sensors kommt die Signalleitung an VR+. Bei einem 5V Signal
des Hall Sensors bleibt der VR- Anschluss offen. Bei einem 12V Signal des Hall Sensors
muss VR- auf 5V ( Pin10 ) gelegt werden.
Einige Hall Sensoren benötigen für die Funktion einen Pullup Widerstand, dieser kann
direkt in den Stecker des Hall Sensors eingebaut werden. Ebenfalls kann es bei einigen
Hall Sensoren nötig sein, das Signal auf VR- zu legen.
Meinst du, dass ich versuchen sollte, das Signal mal auf VR- zu legen, wie beschrieben?
Gruß
Dominik
Re: Caterham R400 Superlight going UMC1
Verfasst: Fr Mai 20, 2016 9:58 am
von Tr6Pi
Nach meinen Erfahrungen, würde ich lieber mal mit 'nem Oszi messen! Das war auch der Rat von no-limits....
Re: Caterham R400 Superlight going UMC1
Verfasst: Fr Mai 20, 2016 12:09 pm
von CKP
Versuchs doch einfach mal. Ich denke mal bei dir kommt man doch schnell hin und kann mal eben auf VR- legen.
Im Tooth-Log sieht man ja dann sofort was Sache ist.
Im Idealfall natürlich nur bei Anlasserdrehzahl schauen (Noch besser: ohne Kerzen und Einspritzanlage, wie man es eigentlich vor dem ersten wirklichen Motorstart machen sollte um eben die Polarität zu checken und Voreinstellung Base-Advance)
Wenn du ihn einfach so startest, kann es vielleicht sein, dass er nicht oder schlecht anspringt, wegen anderem Tooth #1 Angle.
Wenn er startet wird auf alle Fälle der Zündzeitpunkt anders sein.
Re: Caterham R400 Superlight going UMC1
Verfasst: Fr Mai 20, 2016 6:21 pm
von Dominik335i
Ok, werd den Sensor mal auf VR- legen und nen Tooth Log machen. Seid ihr euch denn einig, dass der kleine Balken nach der Lücke sicher auf ein Problem hindeutet oder bloß ein möglicher Ansatz?